2016/09/09
ニュープロダクツ
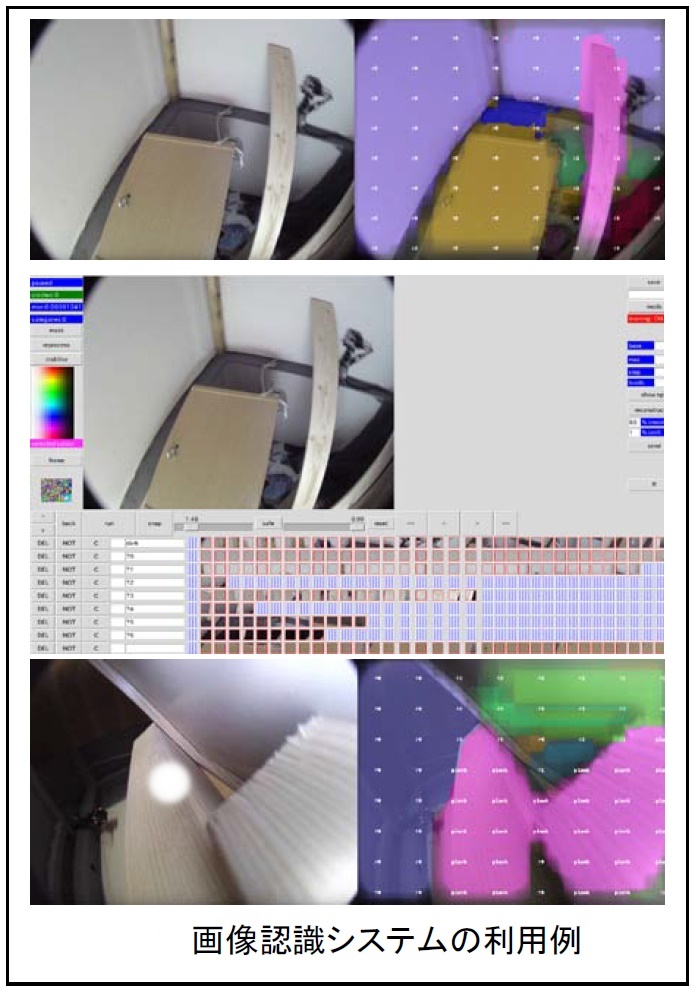
信州大学・山崎公俊助教、アーノード・ソービ研究員、東北大学・田所諭教授らのグループは7日、内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所諭教授)の一環として、被災地で捜索活動などに用いる遠隔操作ロボットで撮影した画像から、周囲に存在するものの種別や探索対象の発見を支援するための画像認識システムの開発に成功したと発表した。
ヘビ型ロボット、サイバー救助犬、ヒューマノイドロボットなど、災害環境で作業を行う様々なタイプのロボットへ搭載ができるもの。
不定形物が乱雑に存在する環境で撮影された映像から、どこに何の物体が写っているか、 表面状態はどうかを自動で識別する。要救助者などが存在しそうな領域の絞り込みに有効だ。
事前学習のために必要とするデータ量が少なく、初めての現場でもすぐに効果を発揮。 操作者との対話を通して識別能力を向上・拡張していくことができる。

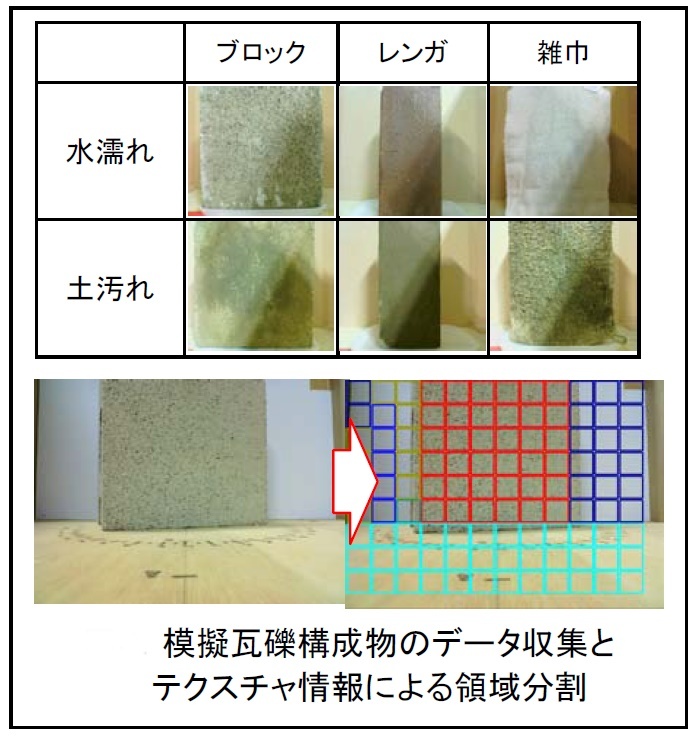
熊本地震や阪神淡路大震災に代表される大規模地震災害では、倒壊した建物内に取り残された人の発見と救助が大きな課題となった。同グループは、ImPACTタフ・ロボティクス・チャレンジの共同研究開発の一つのテーマとして、被災地での捜索活動を支援するための画像認識手法を研究していて、その一環として、災害現場ですぐに利用できる捜索活動補助のための画像認識システムの開発を進めてきた。被災木造家屋を模擬した評価試験フィールドや、森林環境、熊本地震での倒壊家屋で撮影した画像データなどに対して検証を行い、一定の性能が確認された。
ImPACTタフ・ロボティクス・チャレンジで研究開発を進めるレスキューロボットは、1995年の阪神淡路大震災を契機に田所教授らのグループが提唱し、世界を牽引してきた研究分野。田所教授は、災害ロボットの研究が世界的に高く評価され、IEEE Fellow(米国電子技術協会IEEEの最高位メンバー資格)に昇格している。
山崎助教のグループは、布などの不定形物の認識・操作に関する研究で成果を上げていて、平成28年度文部科学大臣若手科学者賞などを受賞している。今回の開発は、そこで培った技術を活用・発展させたものだという。
(了)
ニュープロダクツの他の記事
直近のセミナー・イベント
おすすめ記事
-

大阪・関西万博 多難なスタート会場外のリスクにも注視
4月13日、大阪・関西万博が開幕した。約14万1000人が訪れた初日は、通信障害により入場チケットであるQRコード表示に手間取り、入場のために長蛇の列が続いた。インドなど5カ国のパビリオンは工事の遅れで未完成のまま。雨にも見舞われる、多難なスタートとなった。東京オリンピックに続くこの大規模イベントは、開催期間が半年間にもおよぶ。大阪・関西万博のリスクについて、テロ対策や危機管理が専門の板橋功氏に聞いた。
2025/04/15
-
リスク対策.com編集長が斬る!今週のニュース解説
毎週火曜日(平日のみ)朝9時~、リスク対策.com編集長 中澤幸介と兵庫県立大学教授 木村玲欧氏(心理学・危機管理学)が今週注目のニュースを短く、わかりやすく解説します。
2025/04/15
-

BCMSで社会的供給責任を果たせる体制づくり能登半島地震を機に見直し図り新規訓練を導入
日本精工(東京都品川区、市井明俊代表執行役社長・CEO)は、2024年元日に発生した能登半島地震で、直接的な被害を受けたわけではない。しかし、増加した製品ニーズに応え、社会的供給責任を果たした。また、被害がなくとも明らかになった課題を直視し、対策を進めている。
2025/04/15
-

-

生コン・アスファルト工場の早期再稼働を支援
能登半島地震では、初動や支援における道路の重要性が再認識されました。寸断箇所の啓開にあたる建設業者の尽力はもちろんですが、その後の応急復旧には補修資材が欠かせません。大手プラントメーカーの日工は2025年度、取引先の生コン・アスファルト工場が資材供給を継続するための支援強化に乗り出します。
2025/04/14
-
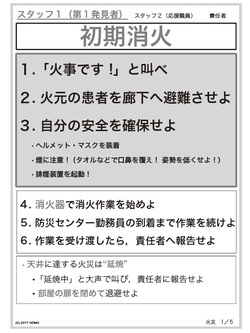
新任担当者でもすぐに対応できる「アクション・カード」の作り方
4月は人事異動が多く、新たにBCPや防災を担当する人が増える時期である。いざというときの初動を、新任担当者であっても、少しでも早く、そして正確に進められるようにするために、有効なツールとして注目されているのが「アクション・カード」だ。アクション・カードは、災害や緊急事態が発生した際に「誰が・何を・どの順番で行うか」を一覧化した小さなカード形式のツールで、近年では医療機関や行政、企業など幅広い組織で採用されている。
2025/04/12
-

-

-

防災教育を劇的に変える5つのポイント教え方には法則がある!
緊急時に的確な判断と行動を可能にするため、不可欠なのが教育と研修だ。リスクマネジメントやBCMに関連する基本的な知識やスキル習得のために、一般的な授業形式からグループ討議、シミュレーション訓練など多種多様な方法が導入されている。しかし、本当に効果的な「学び」はどのように組み立てるべきなのか。教育工学を専門とする東北学院大学教授の稲垣忠氏に聞いた。
2025/04/10
-
















![2022年下半期リスクマネジメント・BCP事例集[永久保存版]](https://risk.ismcdn.jp/mwimgs/8/2/160wm/img_8265ba4dd7d348cb1445778f13da5c6a149038.png)





※スパム投稿防止のためコメントは編集部の承認制となっておりますが、いただいたコメントは原則、すべて掲載いたします。
※個人情報は入力しないようご注意ください。
» パスワードをお忘れの方